A few days ago we anticipated that Intel was going to be one of the great pillars of DARPA’s RACER-Sim program. This program also includes the participation of the Computer Vision Center of Barcelona (Spain) and the University of Texas at Austin (United States), and is focused on the development of advanced simulation solutions for autonomous off-road vehicles which, as many of our readers will already know, are those that are designed to circulate off the roads, in hostile environments that present extreme conditions.
It is a very interesting program, and for this reason we did not want to miss the opportunity to interview Germán Ros, the director of Intel’s Autonomous Agents Lab, in Santa Clara, California, who has become the central nucleus of said program. His great goal is create autonomous systems that can operate in the physical worlddisplaying intelligence, dexterity, and safe behaviors.
To meet this goal, Germán focuses on problems at the intersection of machine learning, computer vision, graphics, simulation for AI, 3D geometry, and autonomous systems. Germán is a great defender of open source and, as part of his research, he has directed top-level projects, such as the CARLA autonomous driving simulator and the Open3D library.
Before joining Intel Labs, German worked as a scientist at the Toyota Research Institute (TRI), where he conducted research in the area of simulation for autonomous driving, scene understanding, and domain adaptation, in the context of autonomous driving. Germán obtained a doctorate as a Computer Engineer at the Autonomous University of Barcelona (2016), and at the Computer Vision Center (CVC).
After this brief but necessary introduction, we are ready to fully enter the interview, although first we want to take the opportunity to thank Germán Ros for his time and his good work during the interview. Now yes, make yourselves comfortable let’s start.

[MCPRO] Would you be so kind as to explain to our readers what exactly DARPA’s RACER-Sim is and what role Intel will play in it?
[Germán Ros] RACER (Robotic Autonomy in Complex Environments with Resilience)-SIM is a government program to create the next generation of simulation platforms with the ultimate goal of accelerating and simplifying the development and validation of off-road autonomous ground vehicles in complex environments.
Intel is one of two teams that DARPA (Defense Advanced Research Projects Agency) has awarded a contract to provide solutions that address the needs of the RACER-SIM program. To do this, Intel has partnered with the Computer Vision Center (Barcelona, Spain), and the University of Texas at Austin (USA) to contribute our combined experience in the fields of simulation engineering, AI and computer vision.
[MCPRO] There is no doubt that developing advanced simulation solutions for autonomous off-road vehicles presents entirely different challenges than their on-road counterparts. How will Intel address these challenges?
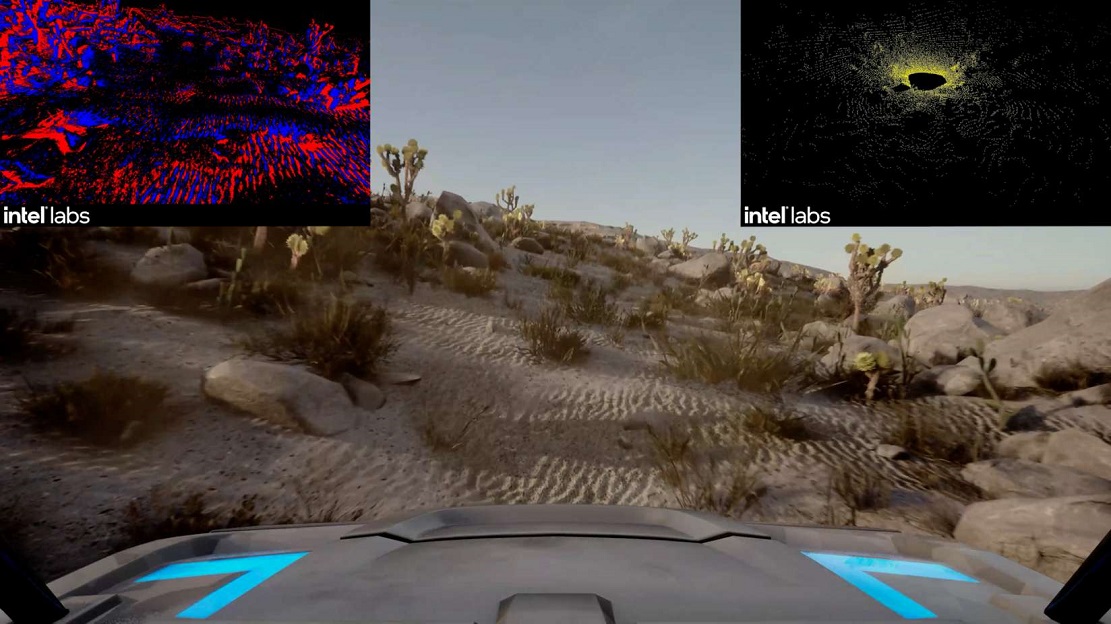
[Germán Ros] In fact, this area presents a whole new set of challenges with respect to road simulation. In off-road environments, simulating the complex interactions between vehicles and different types of soil, rock, and vegetation becomes one of the main problems to be solved.
In road situations, vehicles interact with habitual and totally flat paths, but here we must take into account the deformation of the ground as the vehicle crosses it. Can the vehicle cross an area without getting stuck in the mud? Can you get through a narrow corridor of trees by bending their branches? To answer these questions, very precise simulations have to be carried out, which involve the use of earth mechanics. Traditionally, solving earth mechanics problems is very tedious, resulting in very slow systems unable to scale to large environments. However, we have introduced the use of AI and deep learning techniques to create new solutions that solve these problems in real time. The application of AI to difficult simulation problems is our main differentiator.
[MCPRO] What are the most important goals that Intel has set for itself in the RACER-Sim program?
[Germán Ros] Our main objective is to create a new off-road simulation platform for speed up, simplify and reduce costs in the development and validation processes of off-road autonomous vehicles. We want to create a solution that helps researchers and engineers make autonomous off-road vehicles a reality.
[MCPRO] We know that the Intel Labs simulation platform will allow mapping customization and will be able to shape massive environments covering over 100,000 square miles with just a few clicks. Can you tell us what hardware Intel will be using to support this platform?
[Germán Ros] One of the things that makes this project exciting is that these vast environments can be simulated using basic hardwarelike the one used by players.
[MCPRO] What are the most important advances that we can expect as a result of this program in the field of autonomous driving in off-road environments?
[Germán Ros] In a few years we should be able to have autonomous vehicles that drive at high speeds (70-80 km/h) in off-road environments.